






























機器人在食品加工廠中越來越多地取代人類。 優點之一是在機器人工作的地方,避免了人員對產品的污染。 問題是一些產品,包括精緻的水果和蔬菜,對機器人來說過於敏感,無法處理。
德國食品技術研究所認識到了這個問題,並接受了設計能夠處理敏感產品而不損壞它們的技術的挑戰。 目標有三個:
- 開髮用於衛生處理未包裝食品的新型彈性體(一種聚合物)夾具
- 設計一種抓取敏感物品而不在過程中破壞它們的機器人抓手
- 設計一種既靈活又安全的夾具,用於抓取不同形狀、尺寸和表面光潔度的食品。
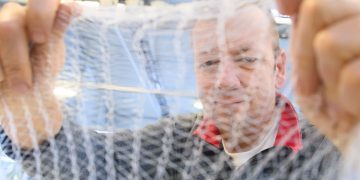
結果是用於機器人衛生處理未包裝食品的新型彈性體抓手。
“該設計的靈感來自於人手,它在抓握和握持方面具有非常高的靈活性,”該研究所的 Knut Franke 說,他在今年德國科隆的 Anuga FoodTec Fair 上提出了這個想法。
“這是由五個手指達到的,可以或多或少地單獨移動,”他說。 “此外,人的手指可以在抓握和握持過程中跟隨輪廓。 另一方面是可以在沒有機械接頭的情況下以非常緊湊的方式設計它。 由於材料較軟,夾持力不像硬質夾持器那樣準時,而是分佈在更大的區域,從而降低了峰值力。”
基於彈性體的抓取技術在處理食品方面具有很高的潛力,與傳統的抓取器相比,它具有多項優勢,包括衛生和靈活性。
該技術具有足夠的適應性,可以抓取不同形狀和尺寸的產品,並且易於製造。 由於它使用TPE(注塑成型),因此可以廉價製造。 抓取系統也有廣泛的應用。
食品夾具的要求
雖然這似乎是相當簡單的技術,但抓手必須滿足幾個要求才能用於食品。 今天,市場上有幾種類型的夾持器,包括機械夾持器、氣動夾持器(過壓和欠壓)、電動夾持器和粘性夾持器。 並非所有食物都適合敏感食物。
例如,機械夾持器可能會受到夾持力的挑戰,弗蘭克說。 通常,它們使用形式或強制鎖定連接,這可能會導致產品損壞。 由於真空夾具將液體吸入系統,因此使用它們會導致沉積物和潛在的污染。 因此,兩者在食品安全和質量方面都不合適。
從技術上講,食品加工中使用的夾持器需要滿足許多要求,弗蘭克說,包括夾持時間和長度、夾持力和必須夾持的件數。
要抓取的物體受許多因素的影響,包括形狀、質量、表面特性、乾燥度、粘性和牢固度。 堅固性和形狀在產品加工中尤為重要。 環境條件,包括溫度和濕度,也是需要考慮的因素。 還需要靈活性,尤其是在處理食物的自然變異性時。
“一般來說,彈性體夾具的原理是基於機械夾具,”弗蘭克說。 “但不是硬金屬或塑料材料,而是採用軟彈性體作為與食品表面接觸的抓手材料。”
第二個主要區別是夾具功能原理。
“因為只有柔軟的手指在壓力下彎曲,所以不需要接頭或類似的結構,這使得這些夾具在機械上非常簡單,”他說。
不過,也許最重要的特點是其緊湊的設計,這使其成為在衛生要求高的環境中使用的理想選擇。
“夾持器的設計是完全可清潔的,因為避免了產品殘留物可能堆積的孔和間隙,”弗蘭克說。
該設計使其特別易於清潔,這對食品加工公司來說是一個好處。
夾具設計是來自三個不同研究機構的德國研究項目的結果。 德國食品技術研究所有這個項目的想法,以及在食品抓取應用方面的經驗。 Fraunhover AVV 進行了施工,德國橡膠技術研究所選擇了彈性體材料。

{kind=link}